
さて話を5月22日の投稿に戻します。
今回は初めてlitchiによる飛行を試します。
いくつものソフトを組み合わせての作業ですし、
飛行計画の作成やデータの受け渡しの方法の情報源はYouTubeの動画だけなので正直不安です。
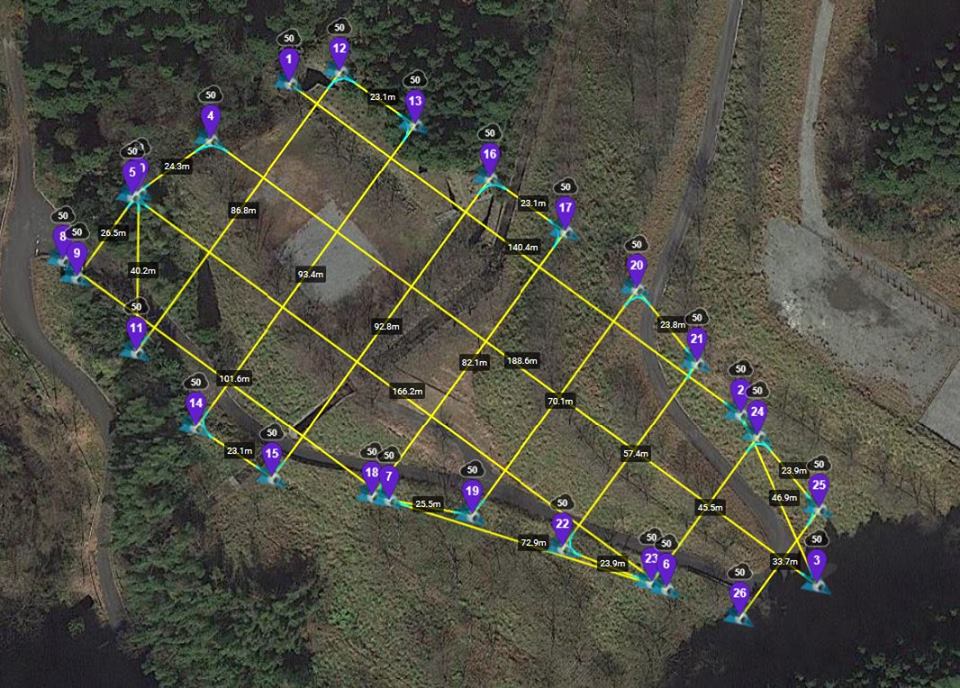
1.まずは飛行計画ソフトで、撮影範囲と所定の写真ラップ率と飛行高度を入力し、そのデータをcsvで出力。
今回は初めてなので対地高度は50mで固定します。
これは事前の現地踏査でトランシットで比高を確認してのことです。
オーバーラップは80%,サイドラップは60%で撮影します。
これに使用するカメラの諸元が加わって計算では4m/sの飛行速度で2.17秒に1回シャッターを切れば
所定のラップ率で撮影できるようです。
2.csvデータを加工してネット経由でlitchiに取り込み
3.評定点を設置してトータルステーションで観測
(評定誤差を1㎝程度が目標値なのでVRSでの観測はしません)
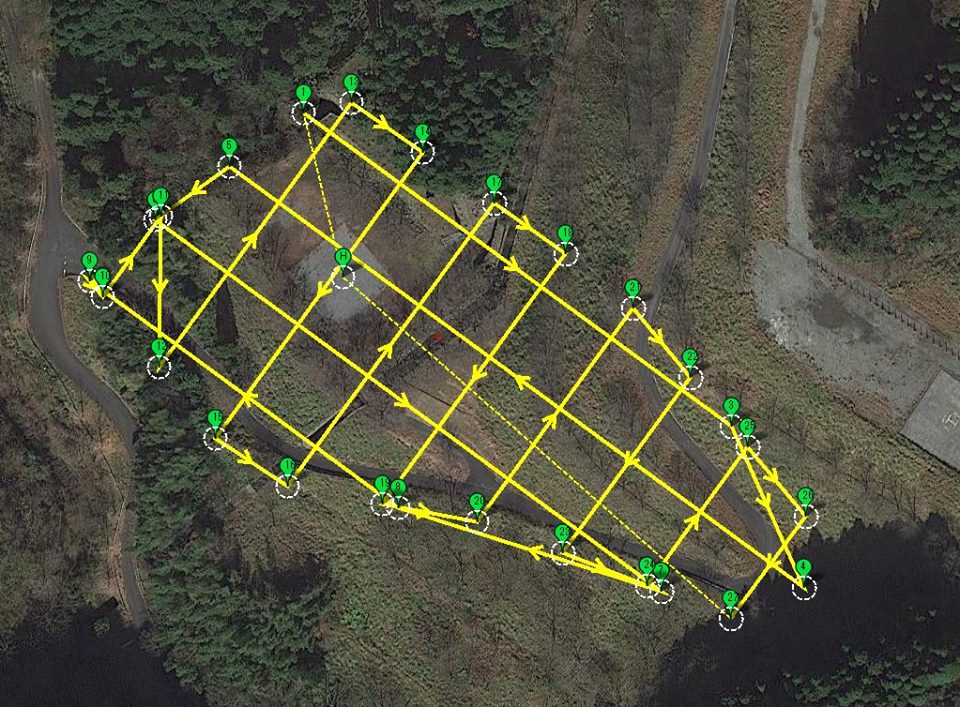
4.離陸させます。
画面上で指定のルートを飛んでいるのが確認でき、とりあえず一安心です。
itchiの場合、飛行ルートの方向だけでなくは機体の方向まで指定できるのですが、その辺も設定通り飛んでいるようです。
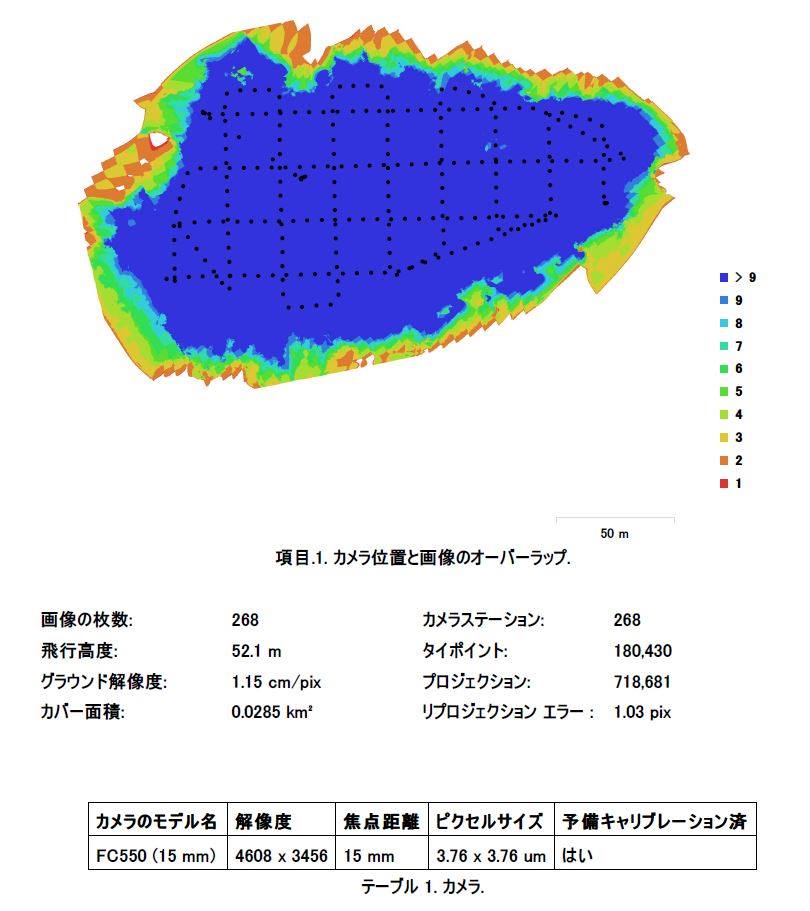
飛行時間は電池の余裕を持った12分程度で格子状に飛ばしました。カメラを鉛直方向と鉛直より30度傾けたもので計600枚弱
撮影しいよいよ解析です。
解析はAgi PhotoScanです。
まずは鉛直写真のみのデータで解析をかけてみます。
ちなみに今回の結果はカメラキャリブレーションを予備測定で実施し、そのデータを入力しています。
PhotoScanの場合はPix4Dと比べて、このキャリブレーションに関するところが弱いらしく、
このやり方が重要らしいのですが、うまく行う為の情報源がありません。所定ではパソコンのモニターに表示させたチェスボートみたいのを
撮影して解析するのですが機体接続型のカメラではうまく行うことが困難です。
今回はあっているかわかりませんが独自の方法で予備測定をしています。
さて解析の結果ですが、
ラップ率はうまいこと言っているみたいです。指定撮影範囲内に関してはどの範囲でも9枚分写真が重なっているとの事です。
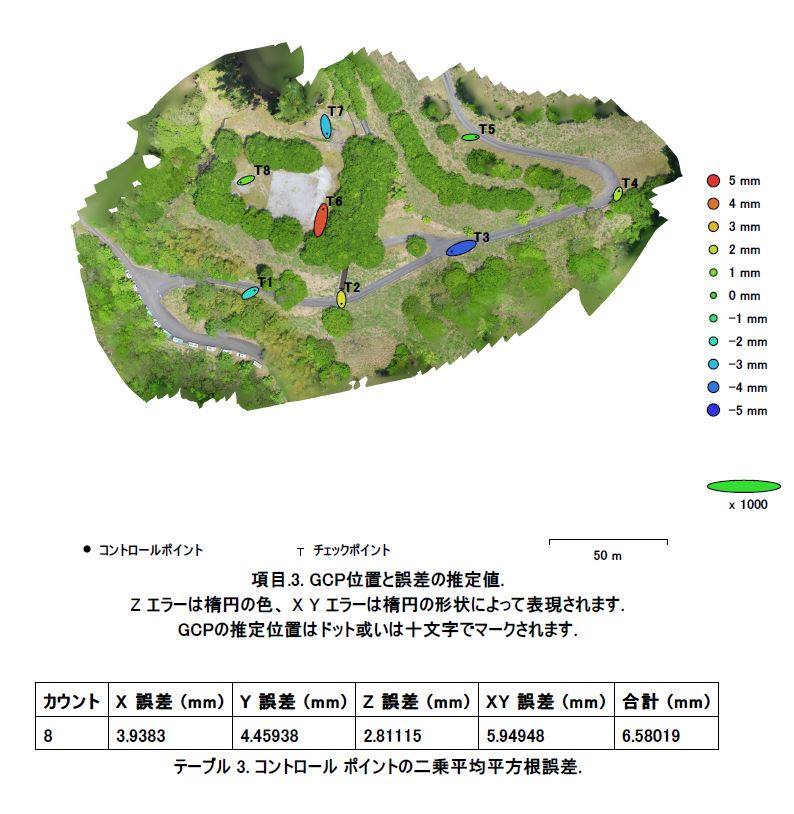
さて肝心な評定点の位置誤差はというと、平均二乗誤差でXYで6mm,標高で3mmという結果です。
正直言って予想外の結果です。ここまでいい数字が出るとは思っていませんでした。
しかし、既定の方法でない独自のカメラのキャリブレーションは、果たして効いているのでしょうか?
今度はカメラキャリブレーションを予備測定でなく、実測写真からのキャリブレーションで試してみます。(続く)