問題点1
まずドローンを担ぎ上げるのに一苦労!
今回使用したDJI GS ProはWPごとに対地高度を設定することができません。
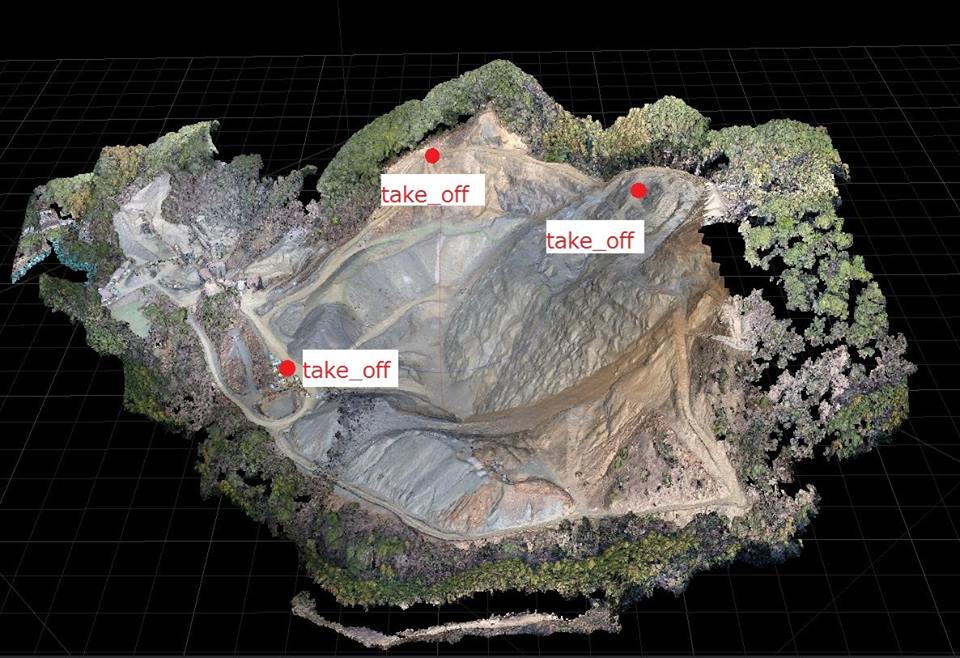
航空法の対地高度150m以下は絶対に守らないといけないので、比高差が150m以上あると必然的に
Take Offのポイントを段階的に上げていきながら数セット撮影しなければなりません。
ここの現場の場合、幸いショベルカーの通り道があったのですが傾斜角が最大で約45度!
ほぼ崖です。つかむものも無い、砕石山特有の崩れやすい地盤を登坂してドローンを飛ばし、また担ぎ上げ・・・
事故がなかったからよかったもののとにかく怖かった!
これだけ極端な現場もあまりないかとは思いますが、ソフトウエアの仕様によって
運搬時の転倒なんかの、しょうもないリスクは避けることができます。
問題点2
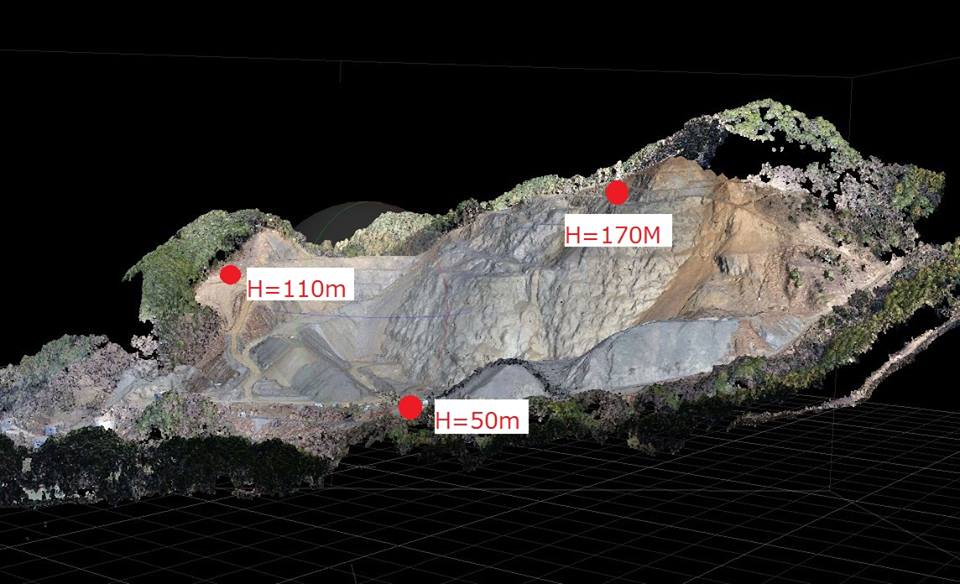
今回はTake_Off地点の対地高度100mで撮影したのですが、WPでの飛行高度をかえられないので、同一の飛行高度をとることになります。
従って今回のような大傾斜地を撮影するとき対地高度50mの箇所もあれば150mとなる箇所もあるという結果になります。
飛行機からの写真測量であれば飛行高度3000mとかからの撮影なので100mくらいの対地高度の差は問題ないのでしょうが、
低空での撮影では、対地高度の影響がもろに出るので、
できるだけ地形に沿って対地高度の差を生じないように撮影してやる必要があるのかな~?と思っています。(素人考えでしょうか)
(その辺はソフトウェアが補正するのでしょうが、どれだけ誤差の少ないデータを取得するのかが一番の肝でしょうから)
問題点3
ラップ率の管理の問題です。
自動航行ソフトにもよりますが少なくとも私が今まで検証したソフトで、飛行範囲を全体で写真の重複率等より飛行ルートや飛行速度を計画したうえで、
電池容量から計算できる1回の飛行時間を考慮してこれらを計画的に分割して運行させることができるのは今のところlitchiのみです。
他のソフトだと現場で撮影範囲を指定しサッと飛んでくれるのはいいのですが、セット間の接合部での写真重複率の管理ができないので、
重複しすぎたり重複が足らなかったりします。
また飛行させる方向が一定にならなかったりして、厳密な写真重複率管理ができず面倒です。
あとlitchiを使用するということは、必然的に現地踏査を行ったうえで事務所のパソコン上で計画を立てた上で飛ばすことになるので、
不思議と計画時に慎重になります。
この採石場ではdjiのGS proを使いましたが、ものすごく大変でした。正直今の仕様では写真測量には向きません。(それに気づいたのが収穫ですが・・・)
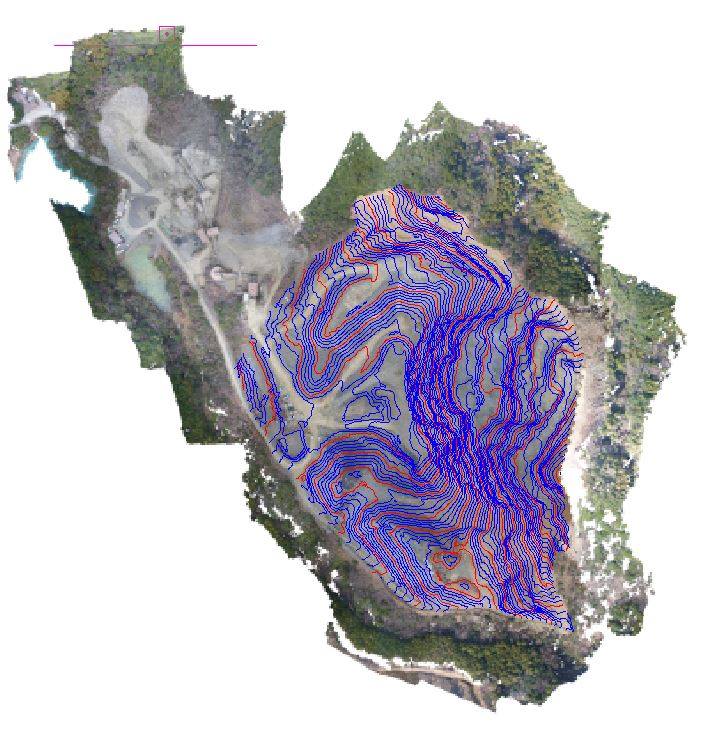
で!、3次元で見れたからどうなんだ!ということなのですが別のソフトウェアにかけてあげれば、等高線の図面になったり、断面図になったりします。
僕が測量専門学校に行っていたころは、WILD(現在のライカ)A10なんていう、大型で、しかも目玉の飛び出るような価格の機械でやっていた図化作業が
今では普通のパソコンでできる時代です。
頑張ってはいるつもりですが、おじさんの頭ではだんだんと理解できなくなってきています!(2016/5/29)